Introducción a la Teoría de Control Con Matlab
Chapter Index
1. Introducción a la Teoría de Control Con Matlab#
Version 0.1
Contenido Original creado por Ezequiel Leonardo Castaño
Este contenido está en BORRADOR y puede estar incompleto y/o sufrir modificaciones
Enlaces Útiles:
Los demás capítulos pueden encontrarse en el homepage.
El repositorio completo está disponible en Github como Control Theory With Matlab
Ante dudas y sugerencias, no dudes en utilizar los Github Issues
%plot inline --format=png -w 1600
format compact;
1.1. Transformada de Laplace#
1.1.1. Definición#
La transformada de Laplace es una generalización de la transformada de Fourier
La transformada de Fourier convierte una función del dominio del tiempo al dominio de la frecuencia
El término \(e^{-j\omega t}\) es la forma exponencial de una función senoidal, donde \(j\) representa a la unidad imaginaria. Sin embargo, esta transformación resulta bastante restrictiva ya que no hay componentes exponenciales puras.
Para añadir un componente exponencial, se agrega un factor exponencial a la función \(x(t)\)quedando:
1.1.2. Desarrollo#
Al trabajar algebraicamente se tiene
Y luego se reemplaza a la expresión \(\sigma -j\omega\) por una nueva variable compleja llamada \(s\), donde \(\sigma\) es la parte real y \(\omega\) la parte imaginaria, este nuevo dominio diferente del tiempo se conoce como plano \(s\).
Esta forma de expresar a la función \(x(t)\) como \(X(s)\)es lo que se conoce como transformada de Laplace, símbolicamente se representa
Análogamente para la transformación inversa
1.2. Propiedades#
Algunas de las propiedades de la transformada de Laplace son
1.2.1. Linearidad#
1.2.2. Retraso o Delay#
Dada una función escalón definida por \(\gamma (t-a)=\left\lbrace \begin{array}{lcc} 0 & si & x\le a\\ 1 & si & x\ge a \end{array}\right.\)
1.2.3. Derivada#
1.2.4. Integral#
1.2.5. Teorema del valor inicial#
1.2.6. Teorema del valor final}#
1.2.7. Convolución#
La operación convolución puede verse gráficamente en esta animación (Fuente)
1.3. Transformaciones comunes#
Normalemente en lugar de hacer la integral, que puede llevar mucho tiempo, se recurre a tablas que tienen las transformadas pre-calculadas. Algunas de las transformadas más comunes son:
1.3.1. Función impulso#
1.3.2. Función escalón#
1.3.3. Función rampa#
1.3.4. Función exponencial#
1.4. Laplace en Matlab#
Definimos los símbolos a utilizar
a = sym("a");
t = sym("t", 'positive');
s = sym("s");
A continuación se muestran algunos ejemplos con sus transformadas y antitransformadas
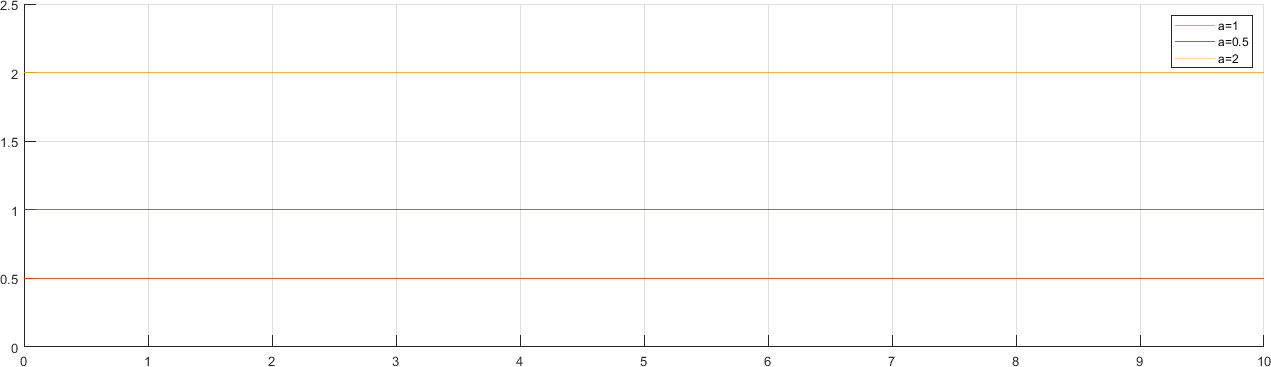
1.4.1. Escalón#
funcion = a;
transformada = laplace(funcion, t, s)
transformada =
a/s
transformada_inversa = ilaplace(transformada)
transformada_inversa =
a
1.4.1.1. Ejemplo Gráfico#
syms f(t) g(t) h(t);
f(t) = 1;
g(t) = 0.5;
h(t) = 2;
figure;
hold on;
fplot([f, g, h], [0 10])
ylim([0 2.5])
grid on
legend("a=1", "a=0.5", "a=2")
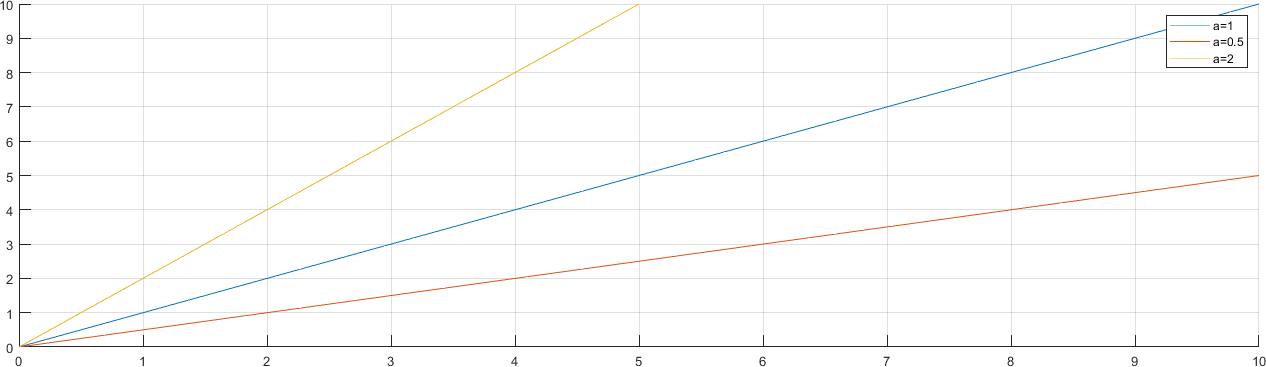
1.4.2. Rampa#
funcion = a * t;
transformada = laplace(funcion, t, s)
transformada =
a/s^2
transformada_inversa = ilaplace(transformada)
transformada_inversa =
a*t
1.4.2.1. Ejemplo Gráfico#
syms f(t) g(t) h(t);
f(t) = 1 * t;
g(t) = 0.5 * t;
h(t) = 2 * t;
figure;
hold on;
fplot([f, g, h], [0 10])
ylim([0 10])
grid on
legend("a=1", "a=0.5", "a=2")
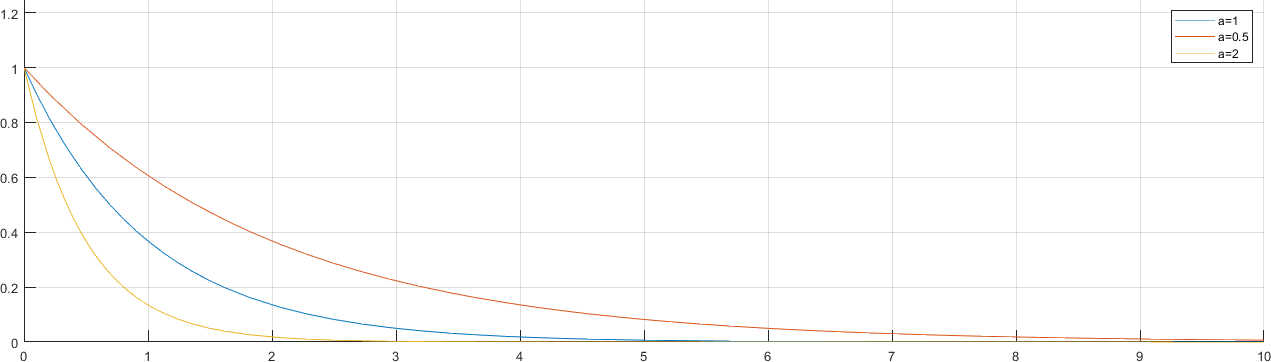
1.4.3. Exponencial#
funcion = exp(-a*t);
transformada = laplace(funcion, t, s)
transformada =
1/(a + s)
transformada_inversa = ilaplace(transformada)
transformada_inversa =
exp(-a*t)
1.4.3.1. Ejemplo Gráfico#
syms f(t) g(t) h(t);
f(t) = exp(-1 * t);
g(t) = exp(-0.5 * t);
h(t) = exp(-2 * t);
figure;
hold on;
fplot([f, g, h], [0 10])
ylim([0 1.25])
grid on
legend("a=1", "a=0.5", "a=2")
1.4.4. Derivada#
syms f(t);
derivada = diff(f, t);
transformada = laplace(derivada, t, s)
transformada =
s*laplace(f(t), t, s) - 1*f(0)
transformada_inversa = ilaplace(transformada)
transformada_inversa =
diff(f(t), t)
integral = int(f, t, 0, t);
transformada = laplace(integral, t, s)
transformada =
laplace(int(f(t), t, 0, t), t, s)
transformada_inversa = ilaplace(transformada)
transformada_inversa =
int(f(t), t, 0, t)
1.5. Ejercicios#
s = sym("s");
1.5.1. Estructura General de un ejercicio#
Se define una función cuya antitransformada se desea calcular
funcion_transformada = 12 / ((s-3)*(s+1))
funcion_transformada =
12/((s + 1)*(s - 3))
Se utiliza la función partfrac para separar en fracciones parciales
fracciones_parciales = partfrac(funcion_transformada)
fracciones_parciales =
3/(s - 3) - 3/(s + 1)
Se calcula la antitransformada a las fracciones parciales
ilaplace(fracciones_parciales)
ans =
3*exp(3*t) - 3*exp(-t)
Se verifica haciendo la antitransformada de la función original
ilaplace(funcion_transformada)
ans =
3*exp(3*t) - 3*exp(-t)
1.5.2. Ejercicios Adicionales#
Ejercicio 1
funcion_transformada = (4) / (s^2 - 9)
funcion_transformada =
4/(s^2 - 9)
fracciones_parciales = partfrac(funcion_transformada)
fracciones_parciales =
0.6667/(s - 3) - 0.6667/(s + 3)
ilaplace(fracciones_parciales)
ans =
0.6667*exp(3*t) - 0.6667*exp(-3*t)
Ejercicio 2
funcion_transformada = (s^2+2*s+3) / (s+1)^2
funcion_transformada =
(s^2 + 2*s + 3)/(s + 1)^2
fracciones_parciales = partfrac(funcion_transformada)
fracciones_parciales =
2/(s + 1)^2 + 1
ilaplace(fracciones_parciales)
ans =
2*t*exp(-t)
Ejercicio 3
funcion_transformada = (5*(s+2)) / (s^2*(s+1)*(s+3))
funcion_transformada =
(5*s + 10)/(s^2*(s + 1)*(s + 3))
fracciones_parciales = partfrac(funcion_transformada)
fracciones_parciales =
2.5000/(s + 1) + 0.2778/(s + 3) - 2.7778/s + 3.3333/s^2
ilaplace(fracciones_parciales)
ans =
3.3333*t + 2.5000*exp(-t) + 0.2778*exp(-3*t) - 2.7778