Función de Transferencia
Chapter Index
2. Función de Transferencia#
Version 0.1
Contenido Original creado por Ezequiel Leonardo Castaño
Este contenido está INCOMPLETO y puede estar incompleto y/o sufrir modificaciones
Material faltante en este capítulo:
Diseño de señales
%plot inline --format=png -w 1600 -h 500
format compact;
2.1. Análisis de un sistema#
Un sistema de primer orden es aquel donde la ecuación diferencial en el dominio del tiempo sólo contiene derivadas de hasta primer orden.
2.2. Forma Estandar#
La forma estándar de un sistema de primer orden está dada por la expresión
En control normalmente se utiliza como variable independiente al tiempo, por ende
2.3. Función de Transferencia#
Y un sistema de control representa como al introducir una determinada entrada, \(x(t)\), se obtiene una determinada salida \(y(t)\), esta relación entre entrada y salida se denomina Función de Transferencia y se suele denominar con la letra \(G\).
La función de transferencia está definida tanto en el dominio del tiempo como en el plano \(s\), en el dominio del tiempo es la convolución entre la entrada y la salida.
La convolución está definida por
Sin embargo, debido a que tanto \(x(t)\) como \(y(t)\) están definidas implícitamente por ecuaciones diferenciales, el cálculo de la convolución resulta extremadamente complejo. Debido a esta dificultad, se utiliza la transformada de Laplace para convertir la convolución en una operación algebraica, quedando entonces
De esta manera, es posible calcular la función de transferencia como
Si el sistema de control es LTI, es decir, es lineal e invariante en el tiempo, una vez hallada la función de transferencia, se puede calcular la salida para cualquier entrada \(x(t)\).
2.4. Sistema LTI#
Dada una función de entrada \(X(t)\), una función de salida \(Y(t)\) y una función de transferencia \(G(t)\). Un sistema es LTI si y sólo si todas las siguientes propiedades se cumplen.
2.4.1. Producto por una constante#
La entrada por una constante produce la salida por la misma constante, dado
Entonces
2.4.2. Aditividad#
La salida de la suma de entradas es igual a la suma de las salidas individuales, dado
Entonces
2.4.3. Invariabilidad#
El comportamiento del sistema no cambia a lo largo del tiempo, dado
Entonces
2.5. Ceros y Polos#
Debido a que \(G(s)\) quedó definida como \(\frac{Y(s)}{X(s)}\) y tanto el numerador como el denominador son transformadas de ecuaciones diferenciales, \(G\) queda definida como un cociente de polinomios.
Al factorizar numerador y denominador se puede expresar la función de transferencia como
Donde \(k\) es una constante real positiva
Donde todos los valores \(-z_1 ,-z_2 ,...-z_{m-1} ,-z_m\) son las raices del numerador y se conocen como ceros del sistema y cuando \(s\) toma cualquiera de estos valores, la función de transferencia tienede 0, es decir
Análogamente todos los valores \(-p_1 ,-p_2 ,...-p_{n-1} ,-p_n\) son las raices del denominador y se conocen como polos del sistema y cuando \(s\) toma cualquiera de estos valores, la función de transferencia tiende a\(\infty\), es decir
Al denominador también se lo conoce como ecuación característica por lo tanto hablar de los ceros o raices de la ecuación característica hace referencia a los polos del sistema
Entonces toda función de transferencia \(G\) queda totalmente definida mediante sus \(m\) ceros y sus \(n\) polos.
2.5.1. Clasificación basada en cantidad de polos y ceros#
Dada una función de transferencia \(G\) con \(m\) ceros y \(n\) polos, se puede clasificar como:
Estrictamente Propia si \(n>m\)
Propia si \(n\ge m\)
Bipropia si \(n=m\)
Impropia si \(n<m\)
Cuando la función de transferencia representa un proceso físico, nunca puede ser impropia, es decir, el grado del numerador nunca superará al del denominador.
Esto es importante ya que, si bien en Matlab es posible definir funciones de transferencia impropias, herramientas de simulación como Simulink, no son capaces de simularlas
2.6. Sistemas de primer orden#
Al utilizarse sistemas de primer orden, si la función de transferencia es propia, entonces su forma está definida por
Esto es así ya que \(Y(s)\)no puede contener términos de grado mayor a \(2\) ya que eso implicaría derivadas de grado \(2\) o superior. Y si el sistema es propio, esto implica que el numerador no puede tener un grado mayor al denominador.
Se tienen dos casos, cuando \(G\) tiene un cero y cuando no tiene ningún cero
La forma con un cero suele representarse como
Y la forma sin cero suele representarse como: \(G=k\frac{p}{s+p}\) o también \(G=k\frac{1}{\frac{s}{p}+1}\)
En este caso al valor \(\frac{1}{p}\) se le conoce como constante de tiempo y se representa con \(\tau\) quedando
2.7. Funciones de transferencia en Matlab#
En matlab existen diversas formas de declarar funciones de transferencia. Es importante destacar que a diferencia del módulo de procesamiento simbólico, al usar funciones de transferencia, no se realizan simplificaciones, para ilustrar este punto se utilizarán 2 polos y ceros idénticos que normalmente podrían simplificarse pero que Matlab en ningún momento lo hace.
Declarando la variable compleja \(s\)
Usando la variable compleja \(s\) pueden especificarse las funciones de transferencia como cociente de polinomios, como polos y ceros o una combinación de ambos
s = tf("s");
sistema = ((s+2)*(s+1)) / ((s+2)*(s+1)*(s+1.5)) % Polos y Ceros
sistema =
s^2 + 3 s + 2
-------------------------
s^3 + 4.5 s^2 + 6.5 s + 3
Continuous-time transfer function.
sistema = (s^2 + 3*s + 2) / (s^3 + 4.5*s^2 + 6.5*s + 3) % Cociente de Polinomios
sistema =
s^2 + 3 s + 2
-------------------------
s^3 + 4.5 s^2 + 6.5 s + 3
Continuous-time transfer function.
sistema = (s^2 + 3*s + 2) / ((s+2)*(s+1)*(s+1.5)) % Combinación
sistema =
s^2 + 3 s + 2
-------------------------
s^3 + 4.5 s^2 + 6.5 s + 3
Continuous-time transfer function.
Especificando los coeficientes del numerador y denominador
Para utilizar sólamente los coeficientes del numerador y el denominador, se utiliza la función tf
sistema = tf([1 3 2], [1 4.5 6.5 3])
sistema =
s^2 + 3 s + 2
-------------------------
s^3 + 4.5 s^2 + 6.5 s + 3
Continuous-time transfer function.
Especificando los polos y ceros
Para definir la función de transferencia con polos y ceros, se utiliza la función zpk, que además toma un tercer parámetro que es la ganancia
sistema = zpk([-2; -1], [-2, -1, -1.5], 1)
sistema =
(s+2) (s+1)
-------------------
(s+2) (s+1.5) (s+1)
Continuous-time zero/pole/gain model.
2.8. Ceros y polos de una función de transferencia#
Independientemente de la forma en la que la función de transferencia haya sido creada, es posible obtener sus ceros y polos con las funciones zero y pole
ceros = zero(sistema);
polos = pole(sistema);
ceros, polos
ceros =
-2
-1
polos =
-2.0000
-1.0000
-1.5000
2.9. Convirtiendo entre polos/ceros y coeficientes#
De ceros y polos a coeficientes usando zp2tf
ceros = [-2; -1];
polos = [-2, -1, -1.5];
sistema = zpk(ceros, polos, 1)
sistema =
(s+2) (s+1)
-------------------
(s+2) (s+1.5) (s+1)
Continuous-time zero/pole/gain model.
[numerador, denominador] = zp2tf(ceros, polos, 1);
sistema = tf(numerador, denominador)
sistema =
s^2 + 3 s + 2
-------------------------
s^3 + 4.5 s^2 + 6.5 s + 3
Continuous-time transfer function.
De cociente de polinomios a polos y ceros tf2zp
numerador = [1 3 2];
denominador = [1 4.5 6.5 3];
sistema = tf(numerador, denominador)
sistema =
s^2 + 3 s + 2
-------------------------
s^3 + 4.5 s^2 + 6.5 s + 3
Continuous-time transfer function.
[polos, ceros, ganancia] = tf2zp(numerador, denominador);
sistema = zpk(polos, ceros, ganancia)
sistema =
(s+2) (s+1)
-------------------
(s+2) (s+1.5) (s+1)
Continuous-time zero/pole/gain model.
2.10. Conversión a lenguaje simbólico#
En el notebook de transformada de Laplace se utilizó el procesamiento simbólico de matlab (la función sym ) sin embargo, esas operaciones (ilaplace, laplace, diff, etc) sólo pueden utilizarse con variables simbólicas y no con funciones de transferencia. Para poder convertir de una a otra rápidamente se puede utilizar la función tfdata y poly2sym.
Poder convertir entre funciones de transferencia y Lenguaje simbólico es especialmente útil cuando se quiere calcular la anti-transformada de una salida particular.
2.10.1. Convertir de Función de Transferencia a Simbólico#
s = tf("s");
sistema = (s^2 + 3*s + 2) / (s^3 + 4.5*s^2 + 6.5*s + 3);
[numerador, denominador] = tfdata(sistema, 'v');
s = sym("s");
numerador_sim = poly2sym(numerador, s)
numerador_sim =
s^2 + 3*s + 2
denominador_sim = poly2sym(denominador, s)
denominador_sim =
s^3 + 4.5000*s^2 + 6.5000*s + 3
sistema_sim = simplify(numerador_sim / denominador_sim) % Simplificación Explícita
sistema_sim =
2/(2*s + 3)
2.10.2. Convertir de Lenguaje Simbólico a Función de Transferencia#
s = sym("s");
sistema_sim = (s^2 + 3*s + 2) / (s^3 + 4.5*s^2 + 6.5*s + 3);
[numerador_sim, denominador_sim] = numden(sistema_sim) % Simplificación automática
numerador_sim =
2
denominador_sim =
2*s + 3
numerator = sym2poly(numerador_sim)
numerator =
2
denominator = sym2poly(denominador_sim)
denominator =
2 3
sistema = tf(numerator, denominator)
sistema =
2
-------
2 s + 3
Continuous-time transfer function.
2.11. Respuesta del sistema#
La respuesta del sistema \(y(t)\) está totalmente definida dada la función de transferencia \(G\) y una entrada \(x(t)\)
A continuación se muestra como un sistema de primer orden responde a diferentes tipos de entrada
2.12. Entrada Impulso#
s = tf("s");
sistema = 1 / (0.3*s + 1);
tiempo = 0:0.01:2;
respuesta = impulse(sistema, tiempo);
figure;
ax = subplot(2,1,1);
hold(ax, 'on')
plot(ax, tiempo, transpose(respuesta))
legend('Respuesta')
title("Respuesta del Sistema")
grid on
ax = subplot(2,1,2);
hold(ax, 'on')
plot(tiempo, respuesta)
title("Error")
grid on
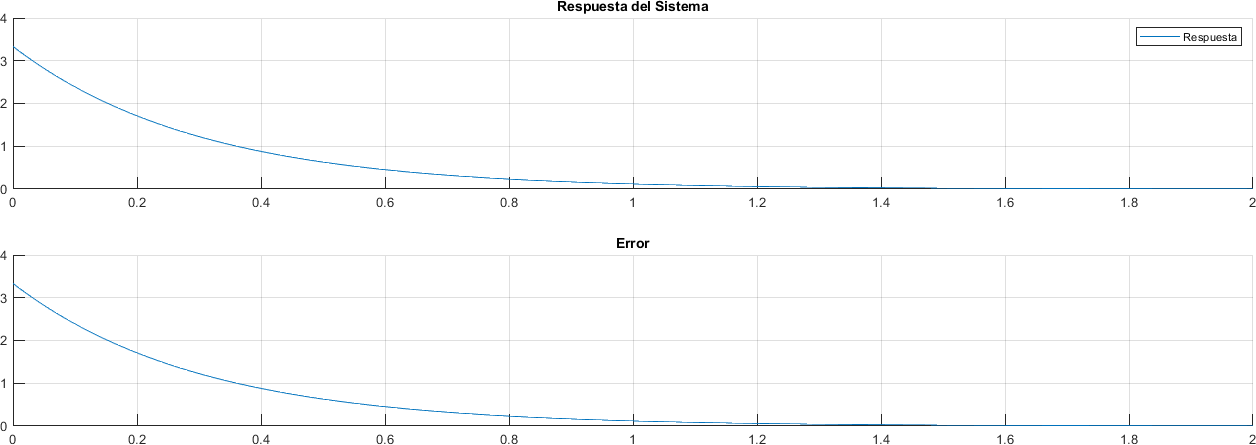
2.13. Flexibilidad de la entrada Impulso#
La entrada impulso tiene la ventaja de ser una constante al usar la transformada de Laplace, esto tiene como consecuencia que puede utilizarse la función impulse para modelar cualquier entrada arbitaria al utilizar su transformada de Laplace
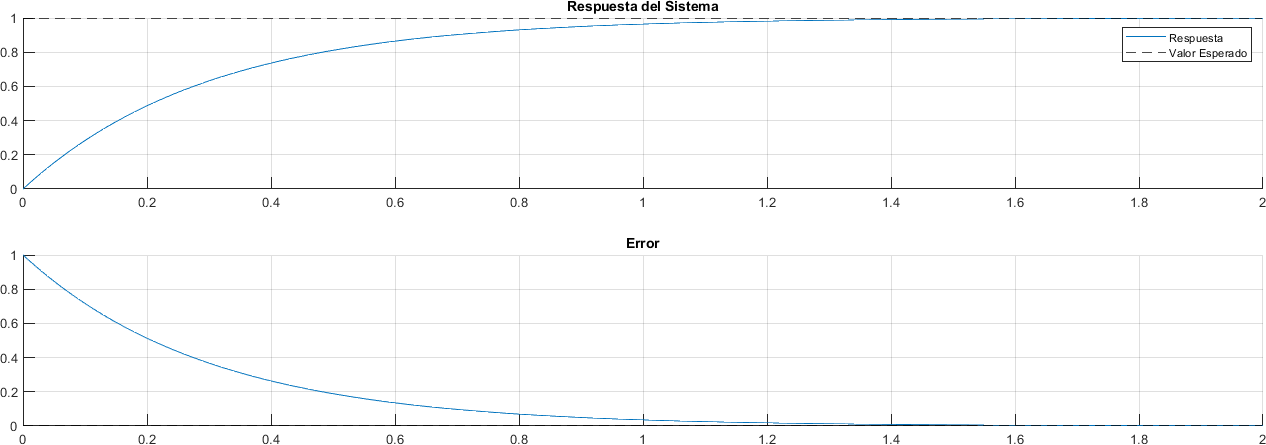
2.14. Entrada Escalón#
Transformada de Laplace
s = sym("s");
t = sym("t");
entrada = 1;
entrada_s = laplace(entrada, t, s)
entrada_s =
1/s
Error en estado estacionario
sistema = 1 / (0.3*s + 1);
salida = entrada_s*sistema;
error = simplify(s * (entrada_s - salida))
error =
(3*s)/(3*s + 10)
error_estacionario = limit(error, s, 0, 'right')
error_estacionario =
0
El sistema puede responder con un error nulo en estado estacionario, esto quiere decir que con el suficiente tiempo, el sistema tendrá el mismo valor de salida que el de referencia.
s = tf("s");
sistema = 1 / (0.3*s + 1);
tiempo = 0:0.01:2;
valor_esperado = 1;
entrada = valor_esperado / s;
respuesta = impulse(entrada*sistema, tiempo);
figure;
ax = subplot(2,1,1);
hold(ax, 'on')
plot(ax, tiempo, transpose(respuesta))
yline(ax, valor_esperado, "--k")
legend('Respuesta', 'Valor Esperado')
title("Respuesta del Sistema")
grid on
ax = subplot(2,1,2);
hold(ax, 'on')
plot(tiempo, valor_esperado - respuesta)
yline(0, "--k")
title("Error")
grid on
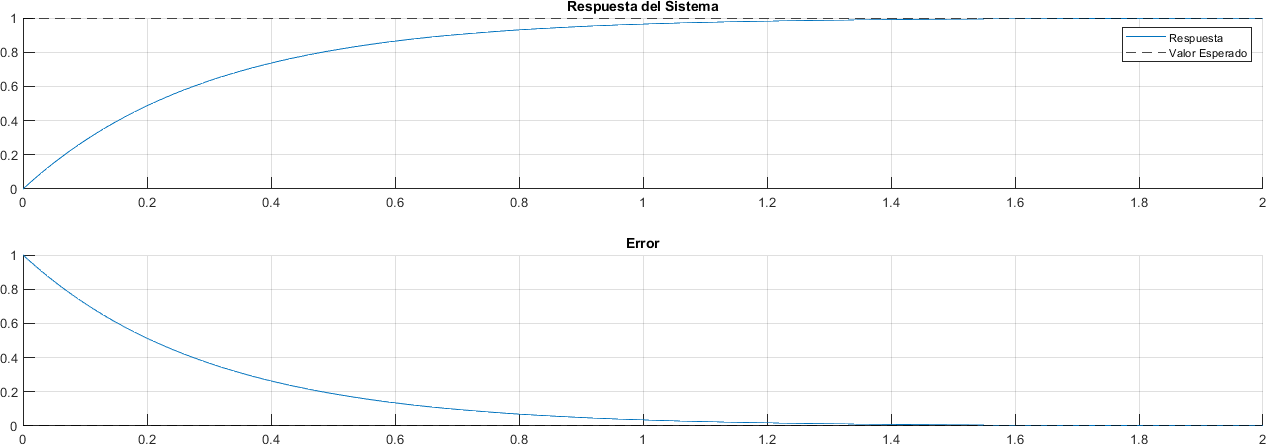
2.14.1. Alternativa - Función step#
En el caso particular de la función escalón, se puede utilizar la función step , sin necesidad de especificar la entrada
s = tf("s");
sistema = 1 / (0.3*s + 1);
tiempo = 0:0.01:2;
valor_esperado = 1;
respuesta = step(sistema, tiempo);
figure;
ax = subplot(2,1,1);
hold(ax, 'on')
plot(ax, tiempo, transpose(respuesta))
yline(ax, valor_esperado, "--k")
legend('Respuesta', 'Valor Esperado')
title("Respuesta del Sistema")
grid on
ax = subplot(2,1,2);
hold(ax, 'on')
plot(tiempo, valor_esperado - respuesta)
yline(0, "--k")
title("Error")
grid on
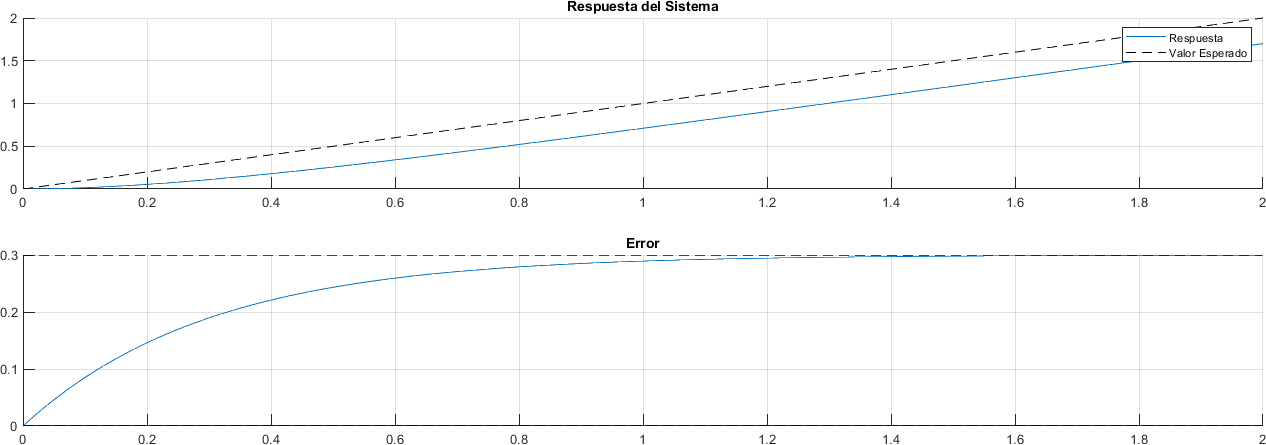
2.15. Entrada Rampa#
Transformada de Laplace
s = sym("s");
t = sym("t");
entrada = t;
entrada_s = laplace(entrada, t, s)
entrada_s =
1/s^2
Error en estado estacionario
sistema = 1 / (0.3*s + 1);
salida = entrada_s*sistema;
error = simplify(s * (entrada_s - salida))
error =
3/(3*s + 10)
error_estacionario = limit(error, s, 0, 'right')
error_estacionario =
0.3000
Al someter el sistema a una entrada rampa se tiene que el error en estado estacionario es \(\frac{3}{10}\), esto es, un error constante a lo largo del tiempo.
s = tf("s");
sistema = 1 / (0.3*s + 1);
tiempo = 0:0.01:2;
valor_esperado = tiempo;
entrada = 1 / s^2;
respuesta = impulse(entrada*sistema, tiempo);
respuesta = transpose(respuesta);
figure;
ax = subplot(2,1,1);
hold(ax, 'on')
plot(ax, tiempo, respuesta)
plot(ax, tiempo, valor_esperado, "--k")
legend('Respuesta', 'Valor Esperado')
grid on
title("Respuesta del Sistema")
ax = subplot(2,1,2);
hold(ax, 'on')
error = valor_esperado - respuesta;
plot(tiempo, error)
yline(error(end), "--k")
yline(0, "--k")
title("Error")
grid on
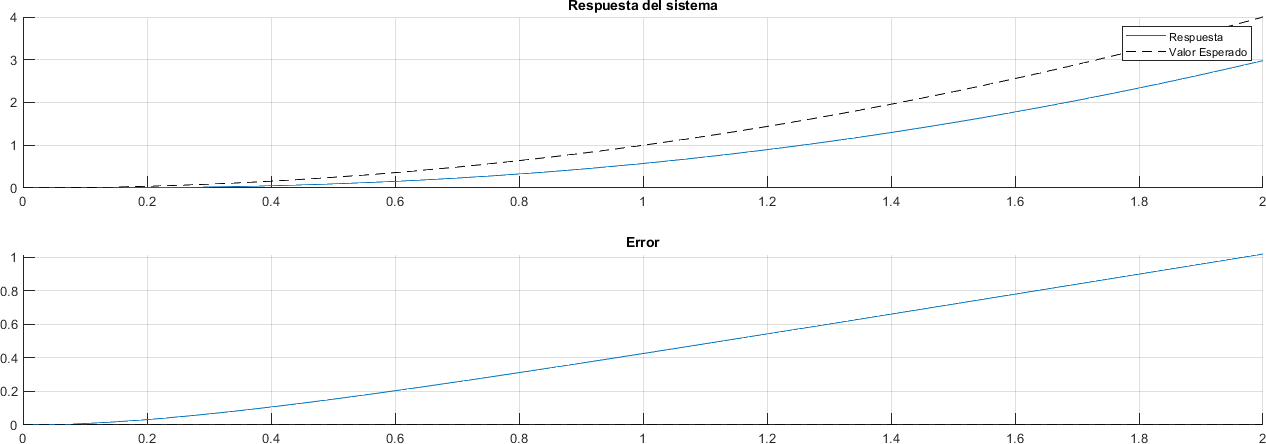
2.16. Entrada Parabólica#
Para una entrada parabólica se tiene
Transformada de Laplace
s = sym("s");
t = sym("t");
entrada = t^2;
entrada_s = laplace(entrada, t, s)
entrada_s =
2/s^3
Error en estado estacionario
sistema = 1 / (0.3*s + 1);
salida = entrada_s*sistema;
error = simplify(s * (entrada_s - salida))
error =
6/(s*(3*s + 10))
error_estacionario = limit(error, s, 0, 'right')
error_estacionario =
Inf
Se tiene entonces que este sistema tendrá un error en estado estacionario que se incrementa infinitamente.
s = tf("s");
sistema = 1 / (0.3*s + 1);
tiempo = 0:0.01:2;
valor_esperado = tiempo .* tiempo;
entrada = 2 / s^3;
respuesta = impulse(entrada*sistema, tiempo);
respuesta = transpose(respuesta);
figure;
ax = subplot(2,1,1);
hold(ax, 'on')
plot(ax, tiempo, respuesta)
plot(ax, tiempo, valor_esperado, "--k")
legend('Respuesta', 'Valor Esperado')
title("Respuesta del sistema")
grid on
ax = subplot(2,1,2);
hold(ax, 'on')
plot(tiempo, valor_esperado - respuesta)
yline(0, "--k")
title("Error")
grid on
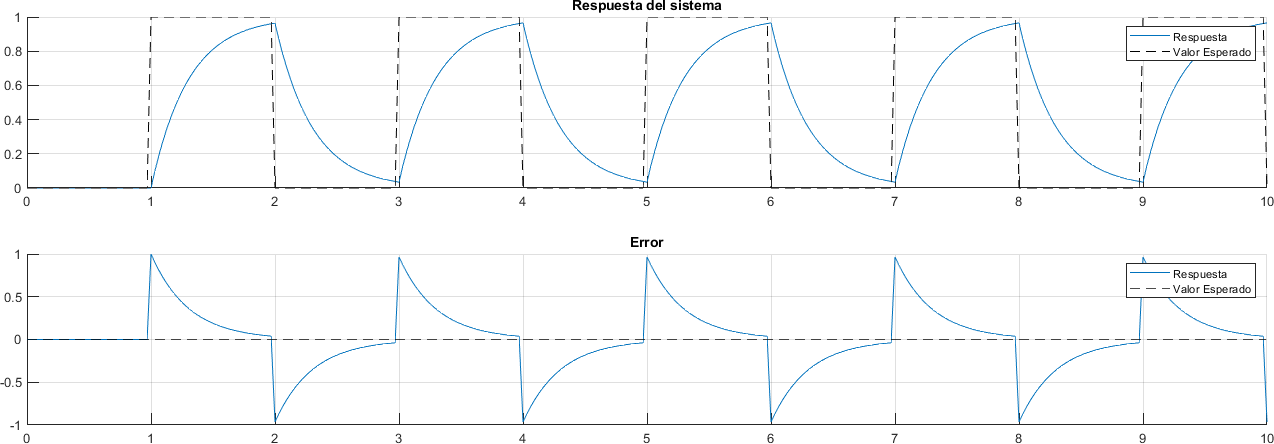
2.17. Entradas Periódicas#
Otro tipo de entrada para los sistemas es la entrada de tipo periódica, con las función gensig es posible generar esas entradas y luego se puede utilizar la función lsim para simular la salida
2.17.1. Onda Cuadrada#
s = tf("s");
sistema = 1 / (0.3*s + 1);
periodo = 2;
[referencia, tiempo] = gensig("square", periodo);
respuesta = lsim(sistema, referencia, tiempo);
figure;
ax = subplot(2,1,1);
hold(ax, 'on')
plot(ax, tiempo, respuesta)
plot(ax, tiempo, referencia, "--k")
legend('Respuesta', 'Valor Esperado')
title("Respuesta del sistema")
grid on
ax = subplot(2,1,2);
hold(ax, 'on')
plot(tiempo, referencia - respuesta)
yline(0, "--k")
legend('Respuesta', 'Valor Esperado')
title("Error")
grid on
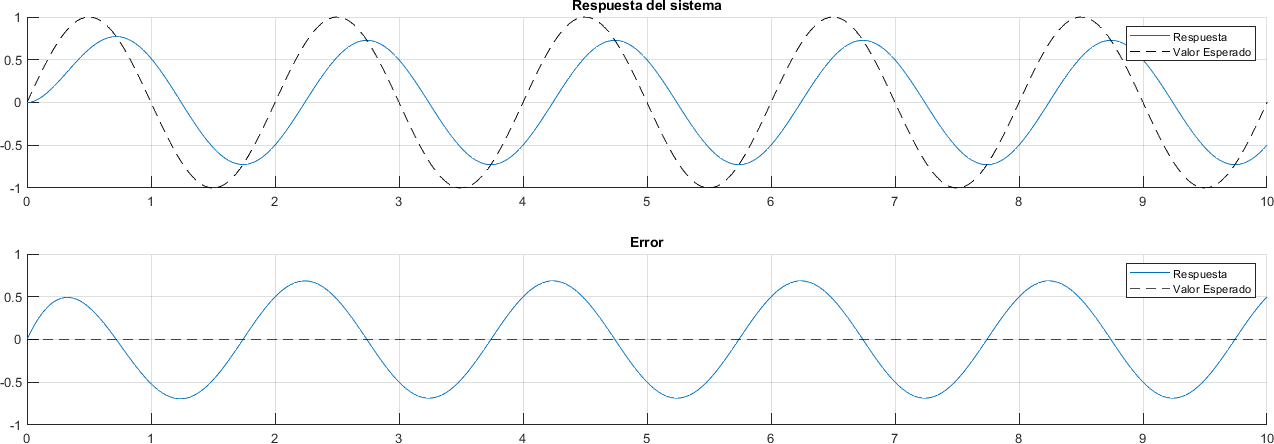
2.17.2. Onda Senoidal#
s = tf("s");
sistema = 1 / (0.3*s + 1);
periodo = 2;
[referencia, tiempo] = gensig("sine", periodo);
respuesta = lsim(sistema, referencia, tiempo);
figure;
ax = subplot(2,1,1);
hold(ax, 'on')
plot(ax, tiempo, respuesta)
plot(ax, tiempo, referencia, "--k")
legend('Respuesta', 'Valor Esperado')
title("Respuesta del sistema")
grid on
ax = subplot(2,1,2);
hold(ax, 'on')
plot(tiempo, referencia - respuesta)
yline(0, "--k")
legend('Respuesta', 'Valor Esperado')
title("Error")
grid on
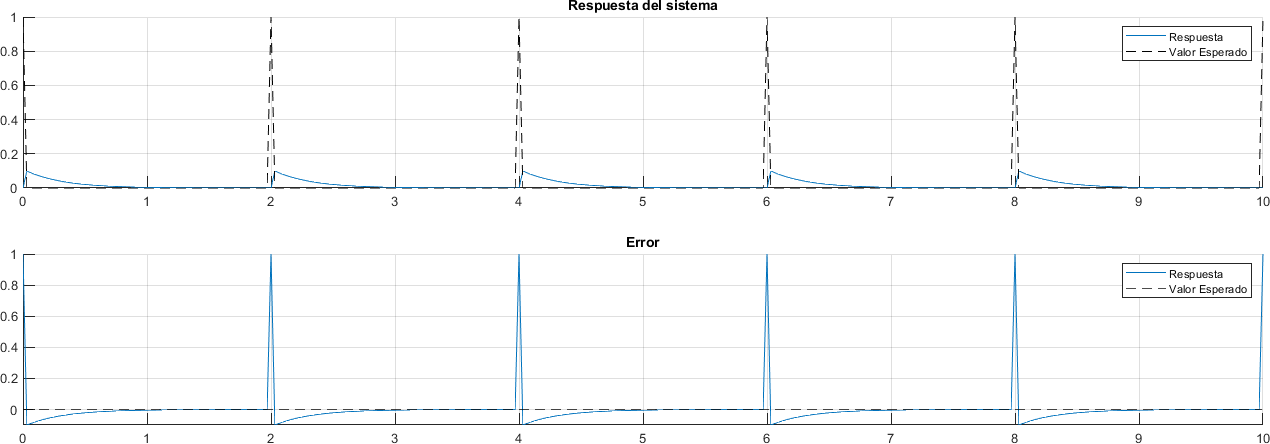
2.17.3. Pulsos Periódicos#
s = tf("s");
sistema = 1 / (0.3*s + 1);
periodo = 2;
[referencia, tiempo] = gensig("pulse", periodo);
respuesta = lsim(sistema, referencia, tiempo);
figure;
ax = subplot(2,1,1);
hold(ax, 'on')
plot(ax, tiempo, respuesta)
plot(ax, tiempo, referencia, "--k")
legend('Respuesta', 'Valor Esperado')
title("Respuesta del sistema")
grid on
ax = subplot(2,1,2);
hold(ax, 'on')
plot(tiempo, referencia - respuesta)
yline(0, "--k")
legend('Respuesta', 'Valor Esperado')
title("Error")
grid on